|
ckb-next
v0.2.8 at branch master
ckb-next driver for corsair devices
|
|
ckb-next
v0.2.8 at branch master
ckb-next driver for corsair devices
|
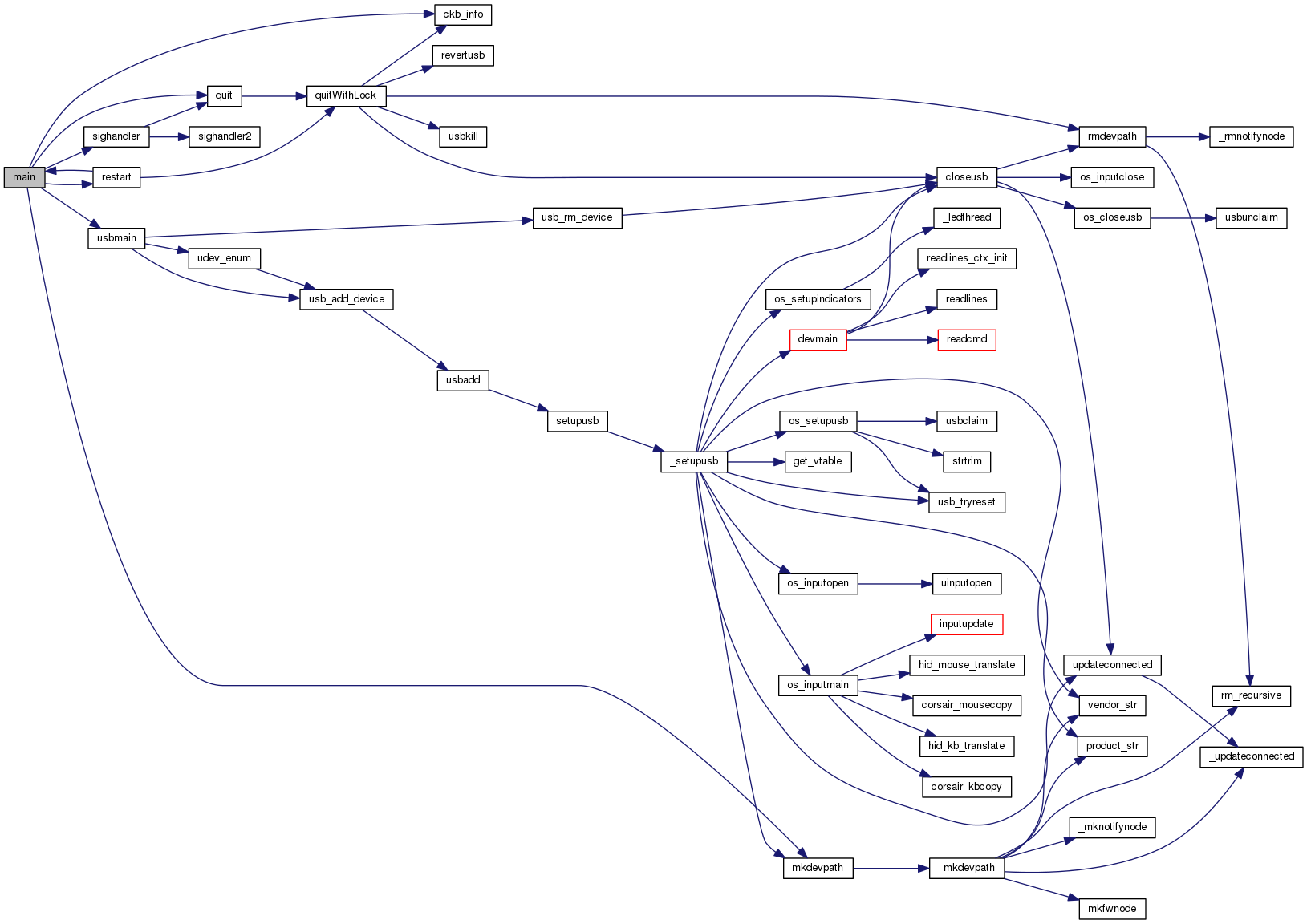
 Include dependency graph for main.c:
Include dependency graph for main.c:Go to the source code of this file.
Functions | |
| static void | quitWithLock (char mut) |
| quitWithLock More... | |
| int | restart () |
| void | timespec_add (struct timespec *timespec, long nanoseconds) |
| static void | quit () |
| quit Stop working the daemon. function is called if the daemon received a sigterm In this case, locking the device-mutex is ok. More... | |
| void | sighandler2 (int type) |
| void | sighandler (int type) |
| void | localecase (char *dst, size_t length, const char *src) |
| int | main (int argc, char **argv) |
Variables | |
| static int | main_ac |
| static char ** | main_av |
| volatile int | reset_stop |
| brief . More... | |
| int | features_mask |
| brief . More... | |
| int | hwload_mode |
| hwload_mode = 1 means read hardware once. should be enough More... | |
| void localecase | ( | char * | dst, |
| size_t | length, | ||
| const char * | src | ||
| ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 88 of file main.c.
References ckb_fatal_nofile, ckb_info(), ckb_info_nofile, ckb_warn_nofile, devpath, FEAT_BIND, FEAT_MOUSEACCEL, FEAT_NOTIFY, features_mask, gid, hwload_mode, keyboard, main_ac, main_av, mkdevpath(), quit(), restart(), sighandler(), and usbmain().
Referenced by restart().
Here is the call graph for this function: Here is the caller graph for this function:
|
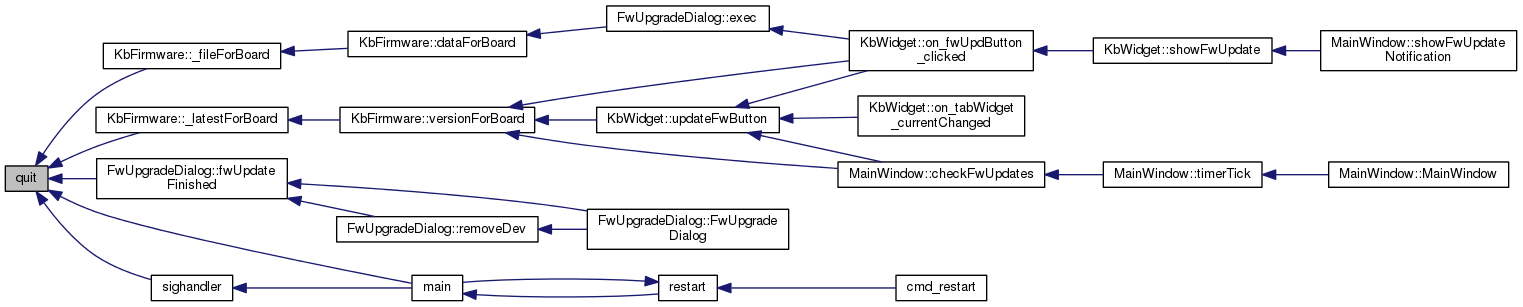
static |
Definition at line 30 of file main.c.
References quitWithLock().
Referenced by KbFirmware::_fileForBoard(), KbFirmware::_latestForBoard(), FwUpgradeDialog::fwUpdateFinished(), main(), and sighandler().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
| mut | try to close files maybe without locking the mutex if mut == true then lock |
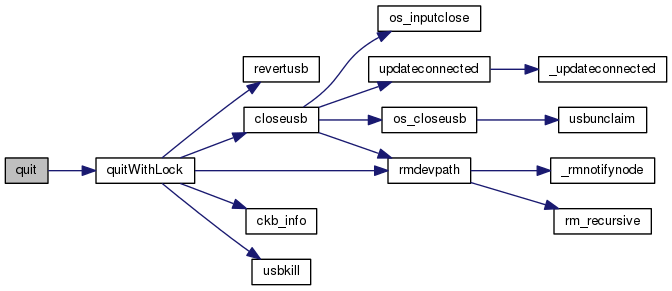
Definition at line 40 of file main.c.
References ckb_info(), closeusb(), DEV_MAX, devmutex, IS_CONNECTED, keyboard, reset_stop, revertusb(), rmdevpath(), and usbkill().
Referenced by quit(), and restart().
Here is the call graph for this function: Here is the caller graph for this function:| int restart | ( | ) |
Definition at line 228 of file main.c.
References ckb_err, main(), main_ac, main_av, and quitWithLock().
Referenced by cmd_restart(), and main().
Here is the call graph for this function: Here is the caller graph for this function:| void sighandler | ( | int | type | ) |
Definition at line 62 of file main.c.
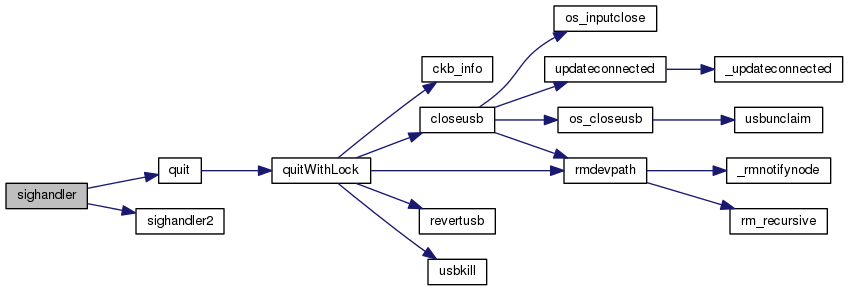
References quit(), and sighandler2().
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:| void sighandler2 | ( | int | type | ) |
Definition at line 57 of file main.c.
Referenced by sighandler().
Here is the caller graph for this function:| void timespec_add | ( | struct timespec * | timespec, |
| long | nanoseconds | ||
| ) |
| int features_mask |
features_mask Mask of features to exclude from all devices
That bit mask ist set to enable all (-1). When interpreting the input parameters, some of these bits can be cleared.
At the moment binding, notifying and mouse-acceleration can be disabled via command line.
Have a look at main() in main.c for details.
Definition at line 35 of file usb.c.
Referenced by _setupusb(), and main().
| volatile int reset_stop |
reset_stop is boolean: Reset stopper for when the program shuts down.
Is set only by quit() to true (1) to inform several usb_* functions to end their loops and tries.
Definition at line 25 of file usb.c.
Referenced by _usbrecv(), _usbsend(), quitWithLock(), and usb_tryreset().
 1.8.6
1.8.6